gyro_sensor --- 板载陀螺仪传感器¶
gyro_sensor 模块的主要功能与函数
功能相关函数¶
-
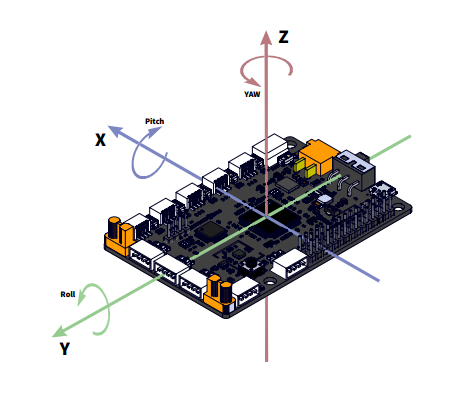
gyro_sensor.get_pitch()¶ 获取姿态角的俯仰角(X轴),单位:°,返回的数据范围是
-180 ~ 180
-
gyro_sensor.get_roll()¶ 获取姿态角的翻滚角(Y轴),单位:°,返回的数据范围是
-180 ~ 180
-
gyro_sensor.get_yaw()¶ 获取姿态角的偏航角(Z轴),单位:°,返回的数据范围是
-32768 ~ 32767,由于板载的陀螺仪模块是六轴传感器,没有电子罗盘。 所以实际上偏航角只是使用了Z轴角速度的积分。它存在着积累误差。如果是想获得真实偏航角的,这个API不适合使用。
-
gyro_sensor.is_shaked()¶ 检测板载陀螺仪模块是否有被摇晃,返回值是布尔值,其中
True表示陀螺仪模块被晃动了,False表示陀螺仪模块未被晃动。
-
gyro_sensor.get_acceleration(axis)¶ 获取三个轴的加速度值,单位是
g,参数:- axis 字符串类型,以
x,y,z代表板载陀螺仪模块定义的坐标轴。
- axis 字符串类型,以
-
gyro_sensor.get_gyroscope(axis)¶ 获取三个轴的角速度值,单位是
°/秒,返回的数据范围是-500 ~ 500,参数:- axis 字符串类型,以
x,y,z代表板载陀螺仪模块定义的坐标轴。
- axis 字符串类型,以
-
gyro_sensor.set_shake_threshold(threshold)¶ 设置震动阈值,参数:
- threshold 震动阈值,范围是``0~100``,系统默认震动阈值为50,0表示关闭震动检测。
程序示例1:¶
import novapi
while True:
print("pitch:", novapi.get_pitch())
print("roll:", novapi.get_roll())
print("yaw:", novapi.get_yaw())
程序示例2:¶
import novapi
while True:
print("x acc:", novapi.get_acceleration("x"))
print("y acc:", novapi.get_acceleration("y"))
print("z acc:", novapi.get_acceleration("z"))
程序示例3:¶
import novapi
while True:
print("x gyro:", novapi.get_gyroscope("x"))
print("y gyro:", novapi.get_gyroscope("y"))
print("z gyro:", novapi.get_gyroscope("z"))
程序示例4:¶
import novapi
novapi.set_shake_threshold(60)
while True:
if novapi.is_shaked():
print("novapi is shaked")