gyro_sensor — Gyro Sensor¶
The main functionality and function of the gyro_sensor module
Function¶
-
gyro_sensor.get_roll()¶ Get the roll of the Euler angle, the returned data range is
-90 ~ 90.
-
gyro_sensor.get_pitch()¶ Get the pitch of the Euler angle, the returned data range is
-180 ~ 180.
-
gyro_sensor.get_yaw()¶ Get the yaw of the Euler angle, The returned data range is
-32768 ~ 32767,Since the gyro sensor is a six-axis sensor, there is no electronic compass. So in fact the yaw angle is just the integral of the Z-axis angular velocity. It has accumulated errors. If you want to get a true yaw angle, this API is not suitable for use.
-
gyro_sensor.is_shaked()¶ Check if the gyro sensor is shaken, the return value is a Boolean value, where
Truemeans that gyro sensor is shaken, andFalsemeans that gyro sensor is not shaken.
-
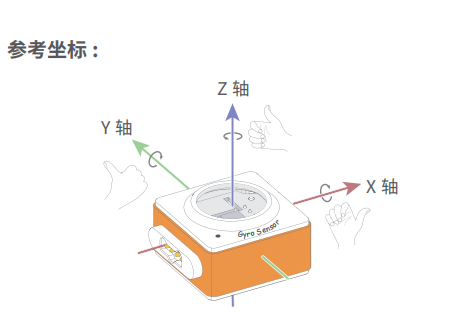
gyro_sensor.get_acceleration(axis)¶ Get the acceleration values of the three axes in
g, Parameters:- axis String type, with
x,y,zrepresenting the axis defined by gyro sensor.
- axis String type, with
-
gyro_sensor.get_gyroscope(axis)¶ Get the angular velocity values of the three axes in
°/sec, Parameters:- axis String type, with
x,y,zrepresenting the axis defined by gyro sensor.
- axis String type, with
Sample Code 1:¶
import rocky
import event
import neurons
@event.button_a_pressed
def on_button_a_callback():
codey.stop_other_scripts()
codey.display.show("pit")
while True:
print(neurons.gyro_sensor.get_pitch())
time.sleep(0.05)
@event.button_b_pressed
def on_button_b_callback():
codey.stop_other_scripts()
codey.display.show("rol")
while True:
print(neurons.gyro_sensor.get_roll())
time.sleep(0.05)
@event.button_c_pressed
def on_button_c_callback():
codey.stop_other_scripts()
codey.display.show("yaw")
while True:
print(neurons.gyro_sensor.get_yaw())
time.sleep(0.05)
Sample Code 2:¶
import rocky
import event
import neurons
@event.start
def start_cb():
codey.display.show("sha")
while True:
print(neurons.gyro_sensor.is_shaked())
time.sleep(0.2)
Sample Code 3:¶
import rocky
import event
import neurons
@event.start
def start_cb():
while True:
print("gyro z:", end = "")
print(neurons.gyro_sensor.get_gyroscope("z"))
print("accel z:", end = "")
print(neurons.gyro_sensor.get_acceleration("z"))
time.sleep(0.2)